Experience
Perception Engineer Intern
Astrobotic Technologies
Supported LiDAR hazard detection C++ flight code development for the Griffin Mission 1 lunar lander. At the end of the 12 week internship, deliverables included:
Teaching Assistant
University of Minnesota - Twin Cities
Developed and taught lessons for CS undergraduate capstone and writing intensive class Software Design and Development. Specific duties included:
Software Research Intern
SIFT (Smart Information Flow Technologies)
SIFT is a research company based in Minneapolis, MN, focused on AI and human factors research.
Corey interned at SIFT for two summers and assisted with software research
and development for a variety of government contracts. Corey also received the Company Hard Worker
Award
for his contributions to various projects.
Specific deliverables included
Computer Repair Technician
University of Minnesota - UMD ITSS
Performed various PC and Mac computer repairs, including data recoveries, component replacement,
and malware removal.
Undergraduate Research Assistant
University of Minnesota - Twin Cities
The University of Minnesota's Interactive Robotics and Vision Lab is the home of the Minnesota Robotics Institute and the state's premier facility for underwater robotics and vision research. Corey spent his summer at the IRV Lab participating in a Research Experience for Undergraduates (REU) program where he worked with professors and PhD students to develop a new underwater robot called LoCO. Specific contributions included
Projects
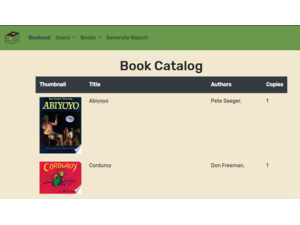
Bookend
Bookend is an electronic library management tool aimed to make classroom library management
easier for
elementary school educators. Teachers typically have hundreds of books in their library,
with many books lent out to their students at a time.
Some teachers use spreadsheets to keep track of their library, but constantly updating a
spreadsheet is
time-consuming and can lead to confusion.
Students can easily check in and out books with a library card and barcode scanner using an
accessible interface.
Teachers can add new books with a barcode scanner, add students, import books from a .csv
file, view
books checked out to students, and much more.
This software was created as part of the Minnehack 2023 Hackathon
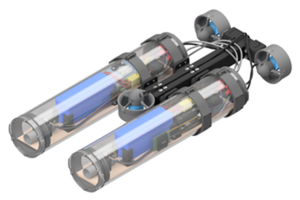
LoCO AUV
LoCO AUV is a Low-Cost Open-source Autonomous Underwater Vehicle (AUV) designed to
perform research in marine environments.
Corey helped design and build LoCO as part of a summer Research Experience for
Undergraduates (REU) program (see Experience).
Notable features include hardware synced cameras in each tube providing stereo imaging which
is processed in realtime using
the on-board NVIDIA Jetson TX2 SoC. Additionally, LED "eyes" and an upward facing OLED
display enable robot-human interaction.
Numerous research projects at the IRVLab at the University of Minnesota
have utilized LoCO, including:

ROS Docker
The Robot Operating System (ROS) is the foundation of many robot software applications in industry and academia. However, ROS configurations tend to be robot specific, which makes it difficult to develop code on a personal computer and transfer it to a robot, since the machines may vary in CPU architecture, operating system, and software packages. Corey maintains Docker images pre-configured with ROS, system drivers, and software packages, which are compatible across lab robots and personal computers. Docker image creation is automated with GitHub hooks and a Jenkins CI pipeline.
DockerHub Repositories
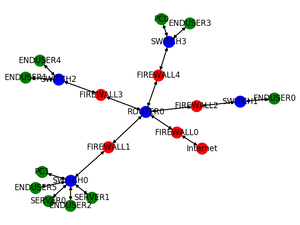
PCGCTF
Procedural Content Generation for Capture The Flag Competitions (PCGCTF) is a complete
system
designed to train users on how to test the security of computer systems. Capture the Flag
(CTF) games
are popular in the computer security community and teach players how to break into a
computer system
in order to capture secret information. Players must gather data and analyze a system for
potential
exploits, execute the exploit, then exfiltrate the secret information.
CTF games are typically hand-crafted due to their complexity. However, PCGCTF utilizes
procedural content
generation techniques to generate a CTF game automatically with varying difficulties and
exploits.
Corey was awarded an Undergraduate Research Opportunity (UROP) project at UMD, where he
built the system
and ran experiments with a dozen participants in order to test the effectiveness of PCGCTF
as a teaching tool.
Air Force Research Labs Senior Design Project
The Air Force Research Labs (AFRL) holds a university design competition each year to design
and build a
system to solve a specific task. Corey opted to join UMD's Senior Design Project team
competing in this
design challenge and helped build the wall-climbing Sensor Deployment Rover. A total of nine
students
and four faculty members worked on this semester-long project and presented their report to
AFRL
members at the end of the semester.
Corey's main contribution was designing and programming the software control stack, which
included
developing:

Gin Rummy Card Playing AI
During his time at SIFT, Corey worked with a few of his fellow interns to create an AI to
compete
in the Gin Rummy EAAI
Undergraduate Research Challenge.
AI researchers have studied games like poker and chess,
but the card game Gin Rummy has been largely untouched. The objective of the EAAI research
challenge is to engage undergraduate students in the research life-cycle, from research
and testing to publication and presentation.
Corey's prior knowledge of Gin Rummy aided his contributions to the project, which
included formulation of playing strategies
of the agent, agent testing, and a written portion of the paper submission to EAAI.
See "Publications" for paper.
Skills
- ROS/ROS2
- C/C++
- Python
- Docker
- System Design
- Jira
- Git/GitHub
- Agile/Scrum
- Embedded Devices
- NVIDIA Jetson
- CAN/CAN-FD
- I2C
- microROS
- OpenCV
- Eigen
- GTest